Ketika sistem katrol dipadu dengan bidang miring, maka percepatan yang dialami oleh benda akan bergantung kepada penguraian gaya berat benda dan gaya gesek antara benda dengan bidang miring.
Sama seperti sistem katrol yang telah dibahas pada artikel sebelumnya, sistem katrol yang dipadu dengan bidang miring juga dikaji berdasarkan ada tidaknya gaya gesek pada bidang miring dan massa katrol.
Berikut akan disajikan empat kemungkinan yang sering terjadi pada sistem katrol dan bidang miring.
Berikut akan disajikan empat kemungkinan yang sering terjadi pada sistem katrol dan bidang miring.
- Massa Katrol diabaikan dan Bidang LicinKetika massa katrol dibaikan, dan bidang miring licin maka berlaku :
- Tegangan tali sama (T1 = T2 = T)
- Tidak ada gaya gesek.
 Pada gambar di atas telah ditunjukkan gaya-gaya yang bekerja pada benda. Pada benda pertama, karena berada pada bidang miring dan gaya berat arahnya ke bawah, maka gaya beratnya harus diuraikan menjadi Wx dan Wy seperti yang terlihat di gambar. Dari gambar jelas terlihat bahwa gaya berat yang berada dalam garis gerak adalah Wx. Jika m1 < m2, maka sistem akan bergerak ke arah m2.
Pada gambar di atas telah ditunjukkan gaya-gaya yang bekerja pada benda. Pada benda pertama, karena berada pada bidang miring dan gaya berat arahnya ke bawah, maka gaya beratnya harus diuraikan menjadi Wx dan Wy seperti yang terlihat di gambar. Dari gambar jelas terlihat bahwa gaya berat yang berada dalam garis gerak adalah Wx. Jika m1 < m2, maka sistem akan bergerak ke arah m2.
Tinjau benda I :
∑F = m.a
⇒ T1 - W1x = m1.a
⇒ T1 = m1.a + W1x
⇒ T = m1.a + W1x
⇒ T = m1.a + W1 sin θ
Tinjau benda II :
∑F = m.a
⇒ W2 - T2 = m2.a
⇒ T2 = W2 - m2.a
⇒ T = W2 - m2.a
Karena tegangan tali sama besar, maka :
m1.a + W1 sin θ = W2 - m2.a
⇒ m1.a + m2.a = W2 - W1 sin θ
⇒ (m1 + m2) a = W2 - W1 sin θ
⇒ a = (W2 - W1 sin θ)/(m1 + m2)
a = W2 − W1 sin θ (m1+ m2)
Dengan :
a = percepatan sistem (m/s2)
W2 = berat benda kedua (N)
W1 = berat benda pertama (N)
m1 = massa benda pertama (kg)
m2 = massa benda kedua (kg)
θ = sudut kemiringan bidang.
- Massa Katrol diabaikan dan Bidang KasarKetika massa katrol diabaikan dan bidang miring kasar, maka berlaku :
- Tegangan tali sama (T1 = T2 = T)
- Terdapat gaya gesek.

Tinjau benda I :
∑F = m.a
⇒ T1 - W1x - Fg = m1.a
⇒ T1 = m1.a + Fg + W1x
⇒ T = m1.a + Fg + W1 sin θ
Tinjau benda II :
∑F = m.a
⇒ W2 - T2 = m2.a
⇒ T2 = W2 - m2.a
⇒ T = W2 - m2.a
Karena tegangan tali sama besar, maka :
m1.a + Fg+ W1 sin θ = W2 - m2.a
⇒ m1.a + m2.a = W2 - Fg - W1 sin θ
⇒ (m1 + m2) a = W2 - Fg - W1 sin θ
⇒ a = (W2 - Fg - W1 sin θ)/(m1 + m2)
a = W2 − Fg − W1 sin θ (m1+ m2)
Dengan :
a = percepatan sistem (m/s2)
W2 = berat benda kedua (N)
W1 = berat benda pertama (N)
Fg = gaya gesek antara benda 1 dan bidang kasar (N)
m1 = massa benda pertama (kg)
m2 = massa benda kedua (kg)
θ = sudut kemiringan bidang. - Massa Katrol diketahui dan Bidang LicinKetika massa katrol tidak diabaikan dan bidang miring licin, maka :
- Tegangan tali tidak sama (T1 ≠ T2)
- Tidak ada gaya gesek.
Tinjau benda I :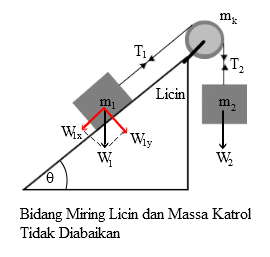
∑F = m.a
⇒ T1 - W1x = m1.a
⇒ T1 = m1.a + W1x
⇒ T1 = m1.a + W1 sin θ
Tinjau benda II :
∑F = m.a
⇒ W2 - T2 = m2.a
⇒ T2 = W2 - m2.a
Tinjau Katrol :
∑τ = I.α
⇒ T2.r - T1.r = k mk r2 . a⁄r
⇒ (T2 - T1) r = k.mk.r.a
⇒ T2 - T1 = k.mk.a
Substitusi nilai T1 dan T2 ke persamaan ketiga, maka :
T2 - T1 = k.mk.a
⇒ W2 - m2.a - m1.a - W1 sin θ = k.mk.a
⇒ W2 - W1 sin θ = k.mk.a + m2.a + m1.a
⇒ W2 - W1 sin θ = (k.mk + m2 + m1) a
⇒ a = (W2 - W1 sin θ ) / (k.mk + m2 + m1)
a = W2 − W1 sin θ (k.mk + m2 + m1)
Dengan :
a = percepatan sistem (m/s2)
W2 = berat benda kedua (N)
W1 = berat benda pertama (N)
k = bilangan atau konstanta pada rumus inersia katrol.
mk = massa katrol (kg)
m1 = massa benda pertama (kg)
m2 = massa benda kedua (kg)
θ = sudut kemiringan bidang.
- Massa Katrol diketahui dan Bidang KasarJika massa katrol tidak diabaikan dan bidang miring bersifat kasar, maka :
- Tegangan tali tidak sama (T1 ≠ T2)
- Terdapat gaya gesek.

Tinjau benda I :
∑F = m.a
⇒ T1 - W1x - Fg = m1.a
⇒ T1 = m1.a + Fg + W1x
⇒ T1 = m1.a + Fg + W1 sin θ
Tinjau benda II :
∑F = m.a
⇒ W2 - T2 = m2.a
⇒ T2 = W2 - m2.a
Tinjau Katrol :
∑τ = I.α
⇒ T2.r - T1.r = k mk r2 . a⁄r
⇒ (T2 - T1) r = k.mk.r.a
⇒ T2 - T1 = k.mk.a
Substitusi nilai T1 dan T2 ke persamaan ketiga :
T2 - T1 = k.mk.a
⇒ W2 - m2.a - m1.a - Fg - W1 sin θ = k.mk.a
⇒ W2 - Fg - W1 sin θ = k.mk.a + m2.a + m1.a
⇒ W2 - Fg - W1 sin θ = (k.mk + m2 + m1) a
⇒ a = (W2 - Fg - W1 sin θ) / (k.mk + m2 + m1)
a = W2 − Fg − W1 sin θ (k.mk + m1+ m2) θ = sudut kemiringan bidang.
Dengan :
a = percepatan sistem (m/s2)
W2 = berat benda kedua (N)
W1 = berat benda pertama (N)
Fg = gaya gesek antara benda 1 dan bidang kasar (N)
k = bilangan atau konstanta pada rumus inersia katrol.
mk = massa katrol (kg)
m1 = massa benda pertama (kg)
m2 = massa benda kedua (kg)




Edutafsi.com adalah blog tentang bahan belajar. Gunakan menu atau penelusuran untuk menemukan bahan belajar yang ingin dipelajari.
0 comments :
Post a Comment